保研
单元测试
matlab入门案例
SAP ABAP
诗歌
数维杯
前后端分离项目
资源
算法的时间复杂度和空间复杂度
Lifecycle
g2o优化
学生个人网页制作
PM项目管理
魔百盒固件
网上书店
智能路由器
CalBioreagents
汇编求解一元二次方程的解
工业智能网关
开发
智能驾驶
2024/4/11 23:20:12
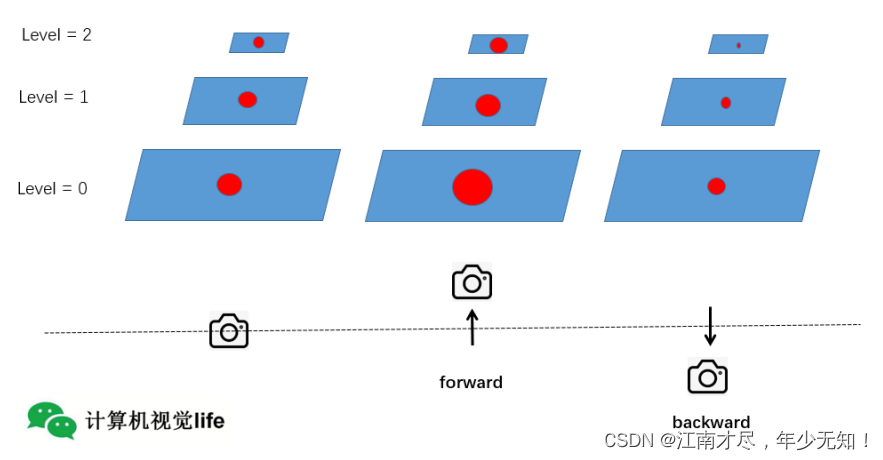
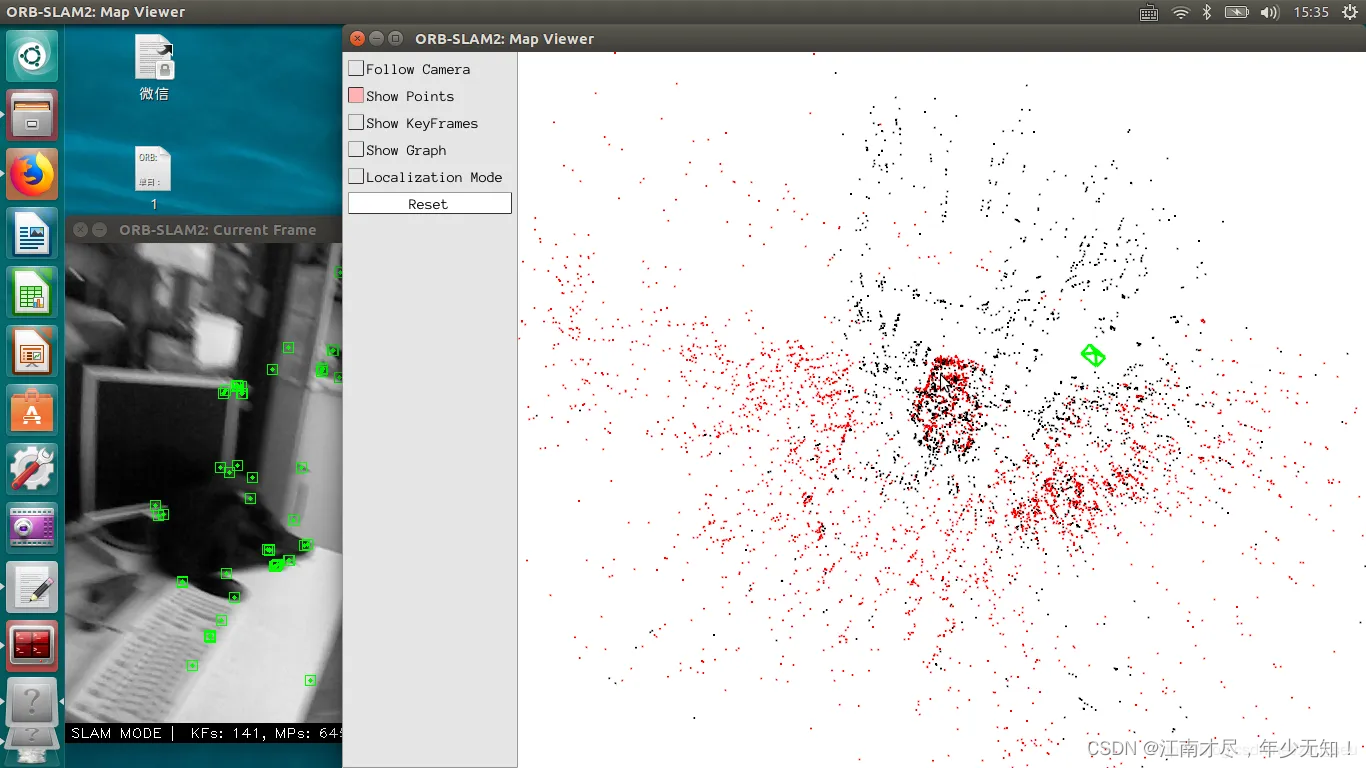
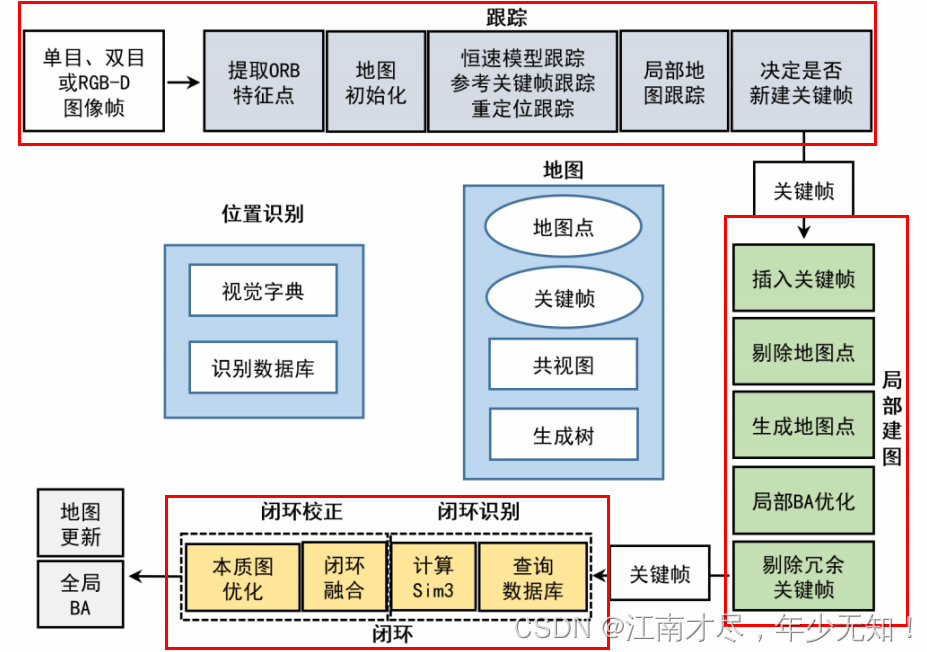
(01)ORB-SLAM2源码无死角解析-(36) 跟踪线程→跟踪丢失后,重定位跟踪 Relocalization()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(45) EPnP 源代码分析(5)→ICP 求解相机位姿
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(39) EPnP 算法原理详解→理论基础三:高斯牛顿迭代
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
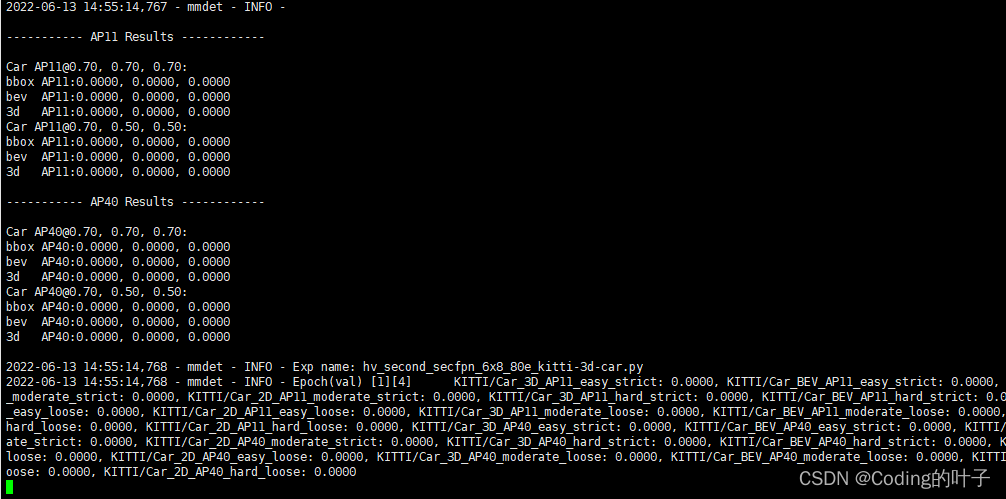
【三维目标检测】Second 模型 (二)
Second模型的基本介绍、稀疏卷积、mini kitti数据集等请参考本专栏的上一篇博文:【三维目标检测】Second 模型 (一)_Coding的叶子的博客-CSDN博客。本节将介绍模型的详细结构与推理过程。文中参考代码来源于mmdetection3d框架中的second模型。…

(01)ORB-SLAM2源码无死角解析-(53) 闭环线程→了解闭环检测、主体框架讲解:LoopClosing::Run
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(49) 局部建图线程→MapPointCulling,CreateNewMapPoints
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析-接如下: (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/123092196 文末正…

(01)ORB-SLAM2源码无死角解析-(31) ORB特征匹配→词袋BoW:BRIEF描述子转BoW向量
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(30) ORB特征匹配→词袋BoW(bag of words):简介,优劣势分析
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(54) 闭环线程→闭环检测:寻找闭环候选关键帧 LoopClosing::DetectLoop()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(42) EPnP 源代码分析(2)→compute_pose():控制点选取,系数计算
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
从智能驾驶全技术供应链看智能驾驶“灵魂”
从智能驾驶全技术供应链看智能驾驶“灵魂”
附赠自动驾驶学习资料和量产经验:链接
智能驾驶主机厂与技术供应链的灵魂之争伴随着智能驾驶技术兴起而来,也伴随着技术供应链的繁荣虽然嘴上很少提起但是行动却很雷厉,首先是扛起民族大旗的华为…

经纬恒润AUTOSAR产品成功适配芯来RISC-V车规内核
近日,经纬恒润AUTOSAR基础软件产品INTEWORK-EAS(ECU AUTOSAR Software,以下简称EAS)在芯来提供的HP060开发板上成功适配芯来科技的RISC-V处理器NA内核,双方携手打造了具备灵活、可靠、高性能、强安全性的解决方案。这极…

【文末送书】深入浅出嵌入式虚拟机原理
欢迎关注博主 Mindtechnist 或加入【智能科技社区】一起学习和分享Linux、C、C、Python、Matlab,机器人运动控制、多机器人协作,智能优化算法,滤波估计、多传感器信息融合,机器学习,人工智能等相关领域的知识和技术。关…
仿真机器人-深度学习CV和激光雷达感知(项目2)day5【作业1与答案1】
文章目录 前言作业1答案1 前言 💫你好,我是辰chen,本文旨在准备考研复试或就业 💫本文内容是我为复试准备的第二个项目 💫欢迎大家的关注,我的博客主要关注于考研408以及AIoT的内容 🌟 预置知识…


经纬恒润重磅推出全新一代5G T-BOX,已获客户定点
近日,经纬恒润正式推出首个采用高通最新一代5G芯片的5G T-BOX产品,并获某主流智能纯电车型定点,预计年底即将量产!
经纬恒润此次推出的全新一代5G T-BOX,搭载高通SA522平台产品,支持3GPP Rel-16技术&#…
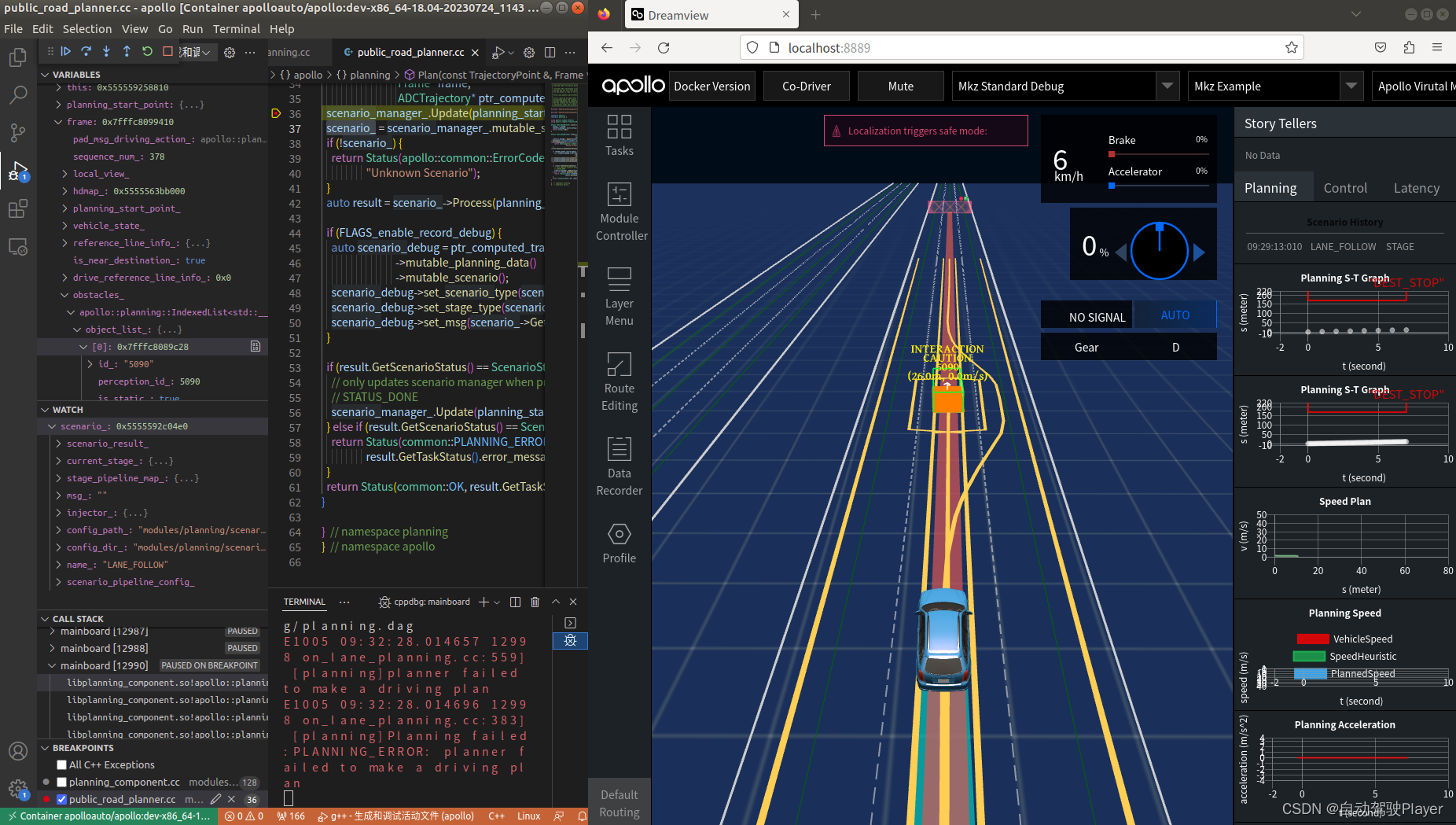
Apollo Planning2.0决策规划算法代码详细解析 (2): vscode gdb单步调试环境搭建
前言:
apollo planning2.0 在新版本中在降低学习和二次开发成本上进行了一些重要的优化,重要的优化有接口优化、task插件化、配置参数改造等。
GNU symbolic debugger,简称「GDB 调试器」,是 Linux 平台下最常用的一款程序调试器。GDB 编译器通常以 gdb 命令的形式在终端…
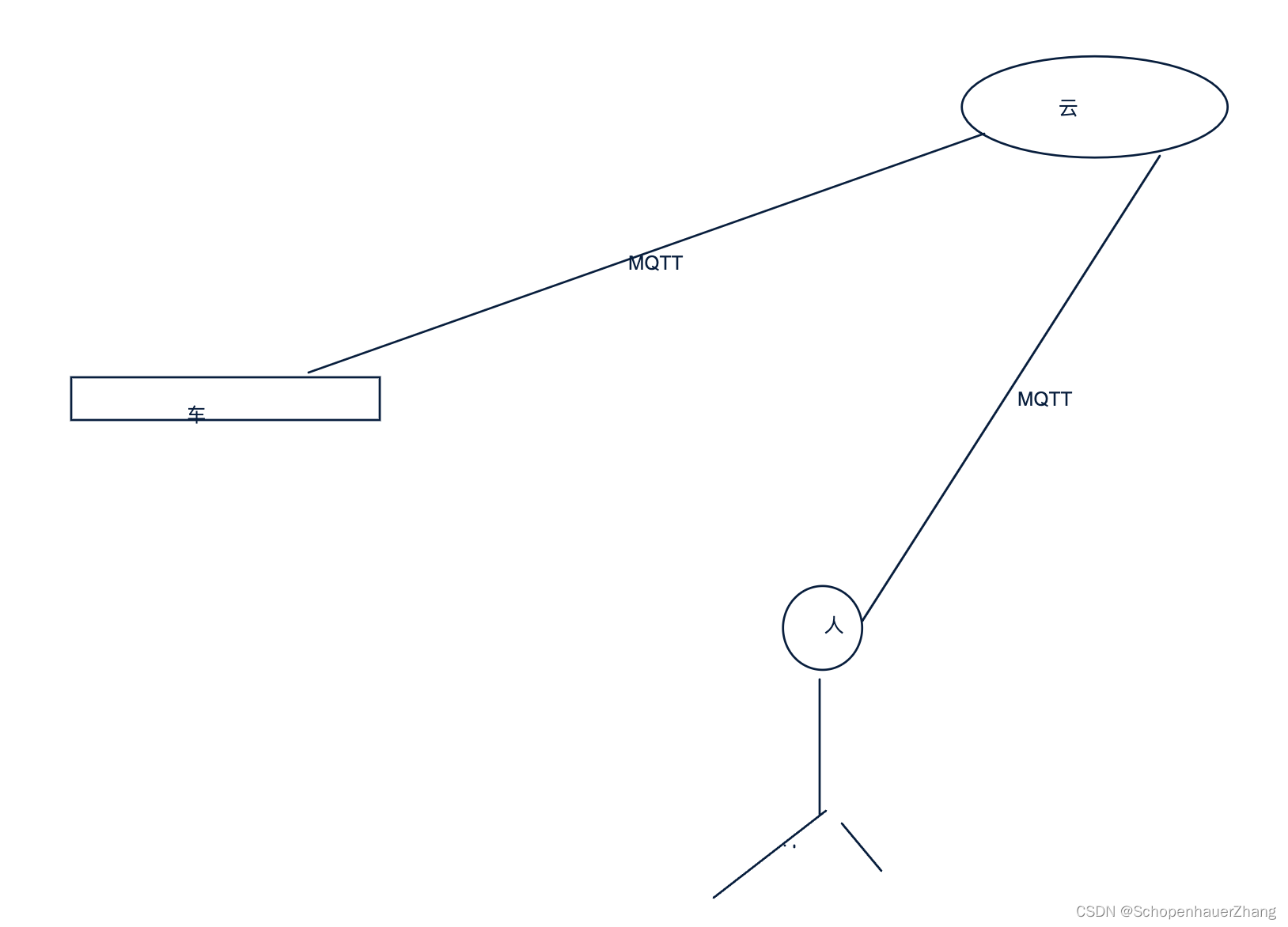
车云一体化系统基础理论
车云一体化系统基础理论 介绍目标正文 参考文档 介绍
最近在调研车云链路一体化的整套解决方案,涉及分布式消息队列(RocketMQ)、分布式存储(Doris)、离线数据处理(Spark)、用户行为日志分析&am…

(01)ORB-SLAM2源码无死角解析-(51) 局部建图线程→SearchInNeighbors():融合重复地图点
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(22) 特征点三角化、深度计算、三维点筛选
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
7000字概述-智能驾驶系统ADS-设计运行域ODD
1. 概述 本文和大家一起来学习智能驾驶系统智能操作设计域,本文中描述了可用于定义ADS的ODD的属性识别。一个ODD描述了一个ADS功能在道路类型、速度范围、照明条件(白天和/或晚上)、天气条件和其他操作限制方面的具体操作域。即使一辆车有多个ADS功能,但每个ADS功能的ODD都…
Fast DDS中的定时器
目录 定时器使用代码分析 定时器使用
Fast DDS中的定时器主要有三个类组成:ResourceEvent,TimedEventImpl, TimedEvent。 ResourceEvent中管理定时器线程,当用户启动定时器时,需要开启ResourceEvent中的定时器线程&am…
(01)ORB-SLAM2源码无死角解析-(26) 关键帧KeyFrame→如何创建、插入关键帧
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

史上最简SLAM零基础解读(4) - 单应性Homography →公式推导与细节理解
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 有兴趣的朋友可以加微信 17575010159 相互讨论技术 - 文末公众号也可关注 一、前言
该篇博客,主要是对 Homography 矩阵进行一个细致的讲解,主要分为三个部分: 基本介绍、参数设定、公式推导、…
(01)ORB-SLAM2源码无死角解析-(35) 跟踪线程→恒速模型跟踪当前普通帧TrackWithMotionModel()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(47) 跟踪线程→局部地图跟踪TrackLocalMap():局部地图更新
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(25) 关键帧KeyFrame→判断系统目前是否需要关键帧
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

Apollo Planning规划算法仿真调试(15):使用Vscode断点调试apollo的方法更新版
前言
使用Vscode断点调试apollo的方法之前在该专栏写过一篇分享,后台很多粉丝留言希望写的更详细一点,所以更新一版,尽量将配置过程详细描述,并且附上完整的配置文档。
Vscode 作为轻量化的调试工具深受广大开发者的青睐,虽然大家都用它来看新闻逛论坛炒股,但是用它开发…
295.【华为OD机试】智能驾驶( 广度优先搜索(BFS)JavaPythonC++JS实现)
🚀点击这里可直接跳转到本专栏,可查阅顶置最新的华为OD机试宝典~ 本专栏所有题目均包含优质解题思路,高质量解题代码(Java&Python&C++&JS分别实现),详细代码讲解,助你深入学习,深度掌握! 文章目录 一. 题目二.解题思路三.题解代码Python题解代码JAVA题解…
【三维目标检测】Second 模型 (一)
Second算法是一种基于三维点云的目标检测算法。Second算法采用了几乎与Voxelnet三维目标检测算法完全一致的设计思路,主要差异表现在将Voxelnet CML(Convolutional Middle Layer)卷积提取特征层改为采用三维稀疏卷积进行特征提取。因此&#…

哪吒汽车与经纬恒润合作升级,中央域控+区域域控将于2024年落地
近日,在2024哪吒汽车价值链大会上,哪吒汽车与经纬恒润联合宣布合作升级,就中央域控制器和区域域控制器展开合作,合作成果将在山海平台新一代车型上发布。 哪吒汽车首席技术官戴大力、经纬恒润副总裁李伟
经纬恒润在智能驾驶领域拥…
全球产业链:智能驾驶产业链
本心、输入输出、结果 文章目录 全球产业链:智能驾驶产业链前言智能驾驶架构层划分感知层通信层决策层定位层智能化升级智能座舱域控制器全球产业链:智能驾驶产业链 前言
全球产业链:智能驾驶产业链,其涵盖了从核心硬件设备到软件算法再到服务应用的所有环节。
首先是核心…

经纬恒润新产品系列 | 这款AR-HUD将颠覆你的认知
随着科技的发展与突破,智能化产品在汽车领域扮演了越来越重要的角色。本文即将介绍**经纬恒润新产品——AR-HUD(增强现实抬头显示系统),**它可以将科幻电影中的驾驶场景变为现实——将信息投影在挡风玻璃上,基于此功能…
近万字解释:智能驾驶系统功能如何定义
本文描述了对已提出装配智能驾驶的样车概念ADS功能的识别。该分析侧重于SAE L3-5级的ADS系统,如谷歌的自动驾驶汽车项目(即Waymo),以及其他类似项目,侧重于下一代自动化。这一步很关键,因为样车概念ADS的功能被用来识别ODD和OEDR,开发初步测试和/或评估方法,并评估FS和…

经纬恒润荣获吉利汽车“最佳价值贡献”奖
8月18日,以“全面向新 共创共赢”为主题,吉利汽车在宁波成功举行2023年电子电器核心供应商恳谈会。经纬恒润凭借在项目合作上持续创新、高效协同等优异表现,获得“最佳价值贡献”奖项。 作为国产汽车代表性品牌之一,吉利汽车积极推…